Understand centripetal acceleration and angular frequency, and their relationship.
Set-up:
Professor Wolf set up and electric scooter and wheel on a table, and allowed the wheel to be in contact with a metal wheel that could spin. Attached to the metal wheel, was a wireless accelerometer that was linked to a computer where he was going to record the data. Attached to the right (out of view) was a piece of paper and a photogate to measure when the piece of tape went by, therefore completing a revolution.
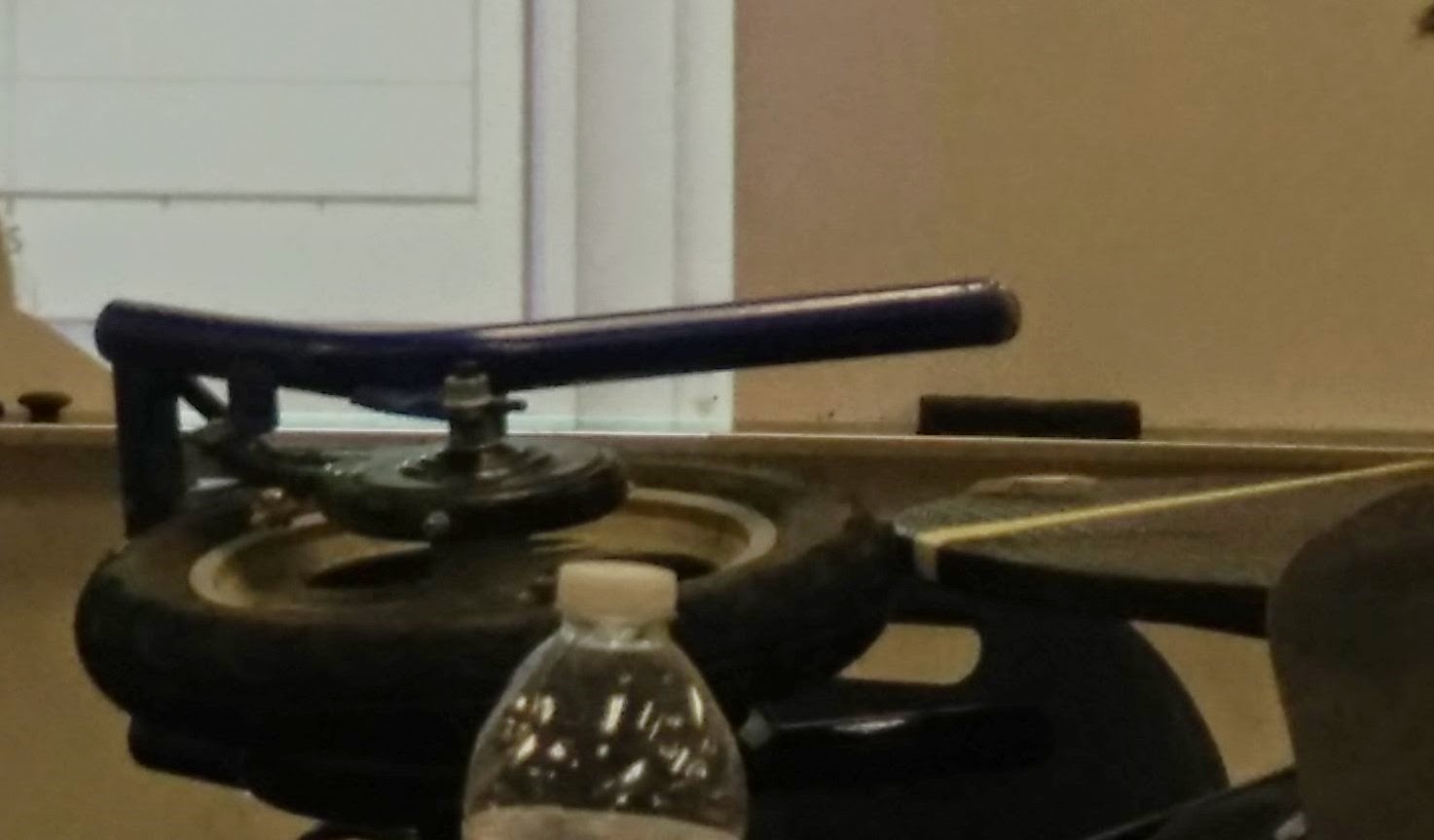
The professor ran 5 experiments with different voltage, meaning that these would differ in velocity tangent to the electrically operated wheel. The data was then collected along with the time it took to complete 10 rotations. Then He used logger pro to give us a value for acceleration.
Analysis:
 We took the recorded data and used logger pro to try and find a relationship between the centripetal acceleration and the angular frequency omega. We then proceeded to graph an omega squared vs acceleration graph to find their relationship. In our data set "Y" is our acceleration whereas "W^2" is omega squared.
We took the recorded data and used logger pro to try and find a relationship between the centripetal acceleration and the angular frequency omega. We then proceeded to graph an omega squared vs acceleration graph to find their relationship. In our data set "Y" is our acceleration whereas "W^2" is omega squared. Then we obtained the following graph. We found that our slope in this graph is our radius. it comes in at .1381 meters or 13.81 cm. Which is well within our range.
Then we obtained the following graph. We found that our slope in this graph is our radius. it comes in at .1381 meters or 13.81 cm. Which is well within our range.
Summary:
This lab allowed us to visually see the relationship between angular velocity and centripetal acceleration. We saw how the equations we learned where probably found and how they relate to each other. Although our radius was not exact, it did fit within our margin of error. This is to be expected as we had some errors in measurement since the accelerometer might have been slightly off-centered and there might be inconsistency within both wheels structures. However, we were able to find the relationship that {acceleration = radius * omegasquared }.